I’ve had a small problem over a year: I have two headphone amplifiers, a transistor-based O2 headphone amp, and a tube-based Little Dot MKII. I also have two sets of headsets. Because switching the cables all the time is somewhat tedious, I haven’t really used the other amp and headphone set.
There are several Y switches that you can buy, but most seemed either expensive or mostly tailored towards electric guitar enthusiasts. And I would still need to combine two Y switches to toggle between the two amps and headphones. As the construction is really simple, I decided to solder my own. Here’s a short tutorial on how to make one yourself. You’ll need:
4 audio connectors (I chose 3.5mm over RCA), two to each end
2 switches with at least 3 connectors (left, right, ground) – I chose two 4 way switches
A box where you can drill holes for the connectors and switches
Small length of wire, some solder and soldering iron
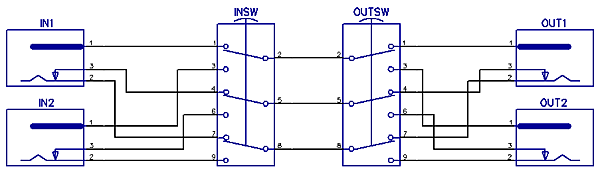
1. The Schematic
The design of the switch is extremely simple. In both ends, three wires come from each of the two connectors to a switch, and the switches are connected to each other. I chose not to combine any ground lines to avoid ground loops. You need also to select a switch which breaks the connection on one side before connecting the other so the amplifiers will not feed into each other.
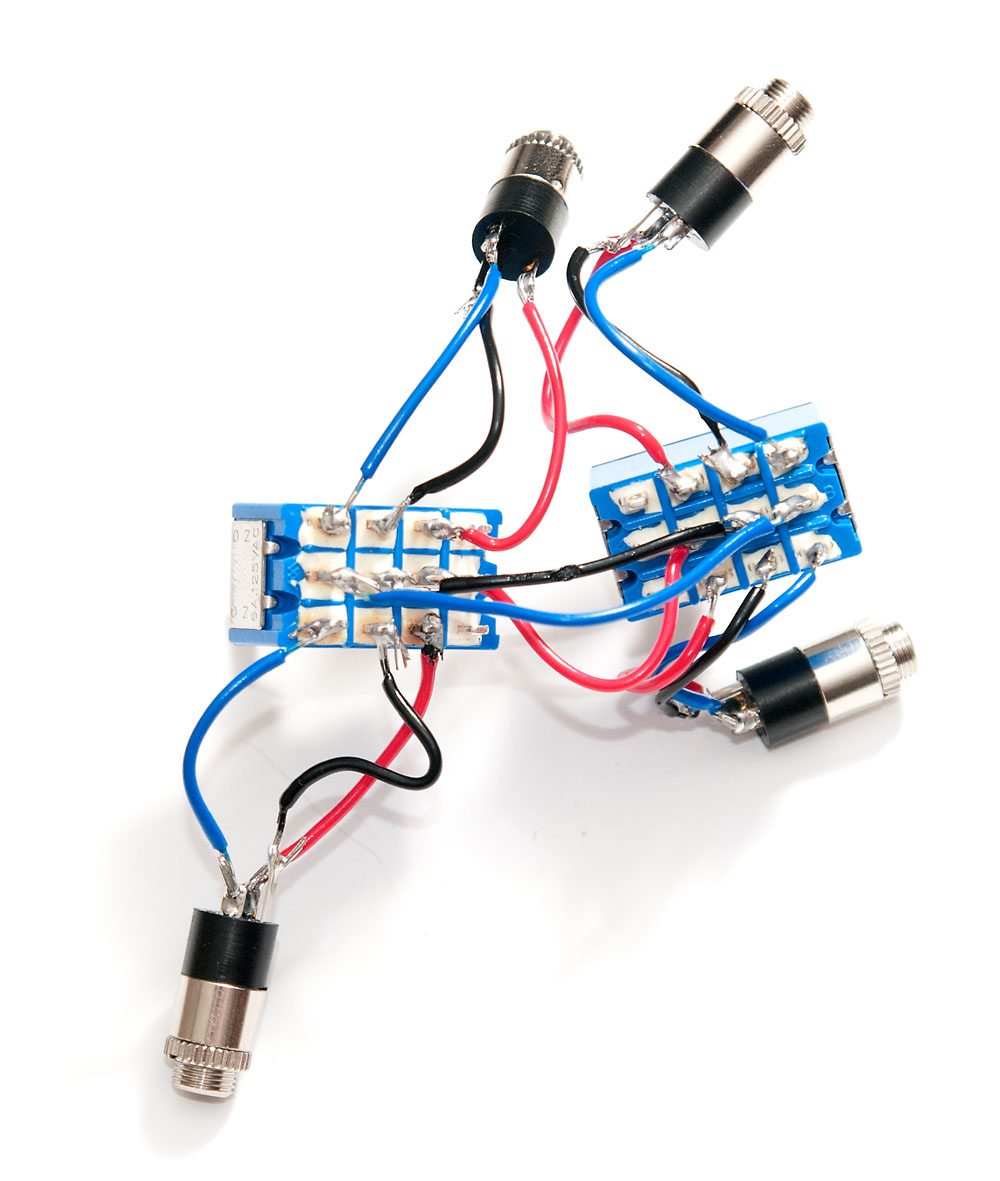
2. Soldering the wires
Despite the simple construction, there is a lot of soldering involved. Each of the four connectors will have ground plus left and right channels, and all have the switch on the other end. That makes 24 solder points (4x3x2), and there’s six more between the switches for a total of 30 points. The 3.5mm connectors had small “L” and “R” markings to tell which channel is left and which is right. I used different colors of wires for each type to avoid mixing L, R and ground.
A web coding tip for a change: After a long coding hiatus, I decided to try my hand at recoding my web-based budget software with AngularJS on the client side and Bottle.py handling the backend. Superb and compact combination, by the way!
Bottle.py comes with a great minimalist templating engine called SimpleTemplate, which uses {{ var }} syntax for inline variables. This does not mix well with client side AngularJS which uses the exactly same delimiters. There is an easy way to change Angular’s syntax with $interpolateProvider, but guess what? Many AngularJS additions, like the datagrid component ui-grid (previously ng-grid) don’t respect this setting, and just plain break with custom delimiters. Not nice
So, what if you want to change SimpleTemplate syntax? Turns out there is very little documentation for it, even if it’s a single line change. Just locate this line in bottle.py:
default_syntax = '<% %> % {{ }}'
…and change it to:
default_syntax = '<% %> % [[ ]]'
And that’s it! Actually, not quite, because bottle default error page template is hardcoded for curly braces. So locate ERROR_PAGE_TEMPLATE in the same file, and change every {{var}} to [[var]].
There is elegant code in bottle.py that seems to enable replacing the default syntax, but unfortunately the only tip for using it seemed somewhat complicated. So I opted for this simple hack. I’ll sure regret it when I next time update my bottle.py, but, well, that’s not in this month, right?
Back again! The summer holidays gave me some time to write after a long hiatus, and this time it’s a Raspberry Pi related article. I’ve had the excellent opportunity to play around with a Raspberry Pi Camera Module for a few days. Or actually modules, as I got both the normal and NoIR without IR filter (more about that later) from Farnell / Element 14. They also stock an excellent selection of Pi accessories, so be sure to check those out, too.
But without further ado, let’s get onward. I’m still thinking up cool projects to do with the camera, so if you have nice ideas, please feel free to share them in the comments section!
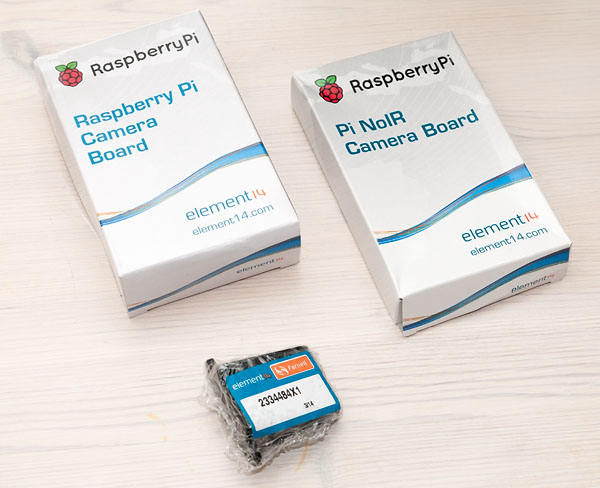
Unboxing and First Impressions
The camera modules arrived in simple boxes, branded with element14 logo and URL. A nice additional touch was an included instruction sheet outlining the installation procedure, as well as a link to www.element14.com/picamera with further info.
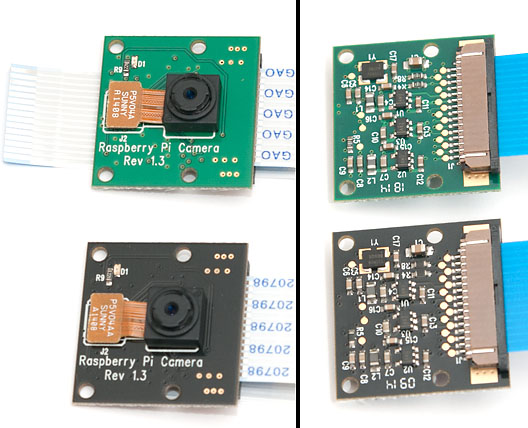
Both the IR-filtered (the one showing normal visible light) and the NoIR (the one without the filter, and thus showing both normal light AND infrared) have exact same outward appearance. The installation was quite easy, but the flat cable offers less positioning and flexing freedom that your standard webcam – obviously the Pi camera is meant for more integrated installations.
Tux logo by Larry Ewing, Simon Budig, Anja Gerwinski
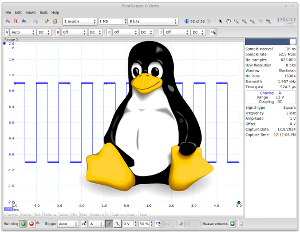
I’ve been a big fan of Picotech’s USB connected PC oscilloscopes ever since I purchased my first PicoScope 2204 almost two years ago. I liked the compact form factor on my desk a lot, and the powerful Picoscope software for Windows – Picotech makes only one version of this software so you get the same functionality with a £159 ($260) 2204 scope as a £5,995 ($9,900) PicoScope 6407 user would – although of course the scope features would be wildly different.
Now Picoscope is a great piece of Windows software and as I generally use Win7 to avoid reboots every time I want to use Photoshop or play a session of Mass Effect, it’s been perfect for me. However, quite a few of electronics enthusiasts are also big advocates of open software movement, and while Picotech has had drivers and SDK for Linux for a while to implement things like my realtime composite decoder, the fact that there is no Linux version of the oscilloscope software has been unfortunate. So when I noticed in the latest Picotech newsletter that there is now a beta of Picoscope for Linux, I knew I had to take it for a spin.
Installing Picoscope on Linux Mint 15
Picotech’s installation process is built on apt packaging system, so a Debian-based Linux distro is the easiest installation target. This includes the wildly popular Ubuntu and Linux Mint distros, which means mainstream Linux users are well catered to. In Picotech forums, the beta thread had at least one user who extracted necessary stuff from the .deb packages and installed the software for Fedora, too.
In Debian-based Mint, the installation went without any hiccups just by following the instructions at Picotech’s Linux Drivers page. Note that sudo apt-get install picoscope also installs all drivers so you don’t need to install your model-specific driver separately. Essentially the installation is just:
Christmas holidays are a wonderful time to invent new projects. I decided I’d do some desktop coding for a change, and try to code an optimized image viewer for my old zipped pocket camera photos. First task of course was to read a zip file.
To my surprise, there wasn’t a “GNU standard library” available for this task like there is zlib for general compression, or libjpeg and libpng for images. Best match for my simple needs seemed to be Minizip, but at 7378 lines of code, and 2125 for just unzip.c (utilizing zlib so basically just file handling), I was not convinced, especially because I knew I had some very specific requirements to cater for (namely uncompressing all JPEGs to memory for fast rendering and thumbnail generation).
Zip File Structure – The Essentials
The ZIP file format turned out to be surprisingly simple, especially since I decided I would be sticking to bare essentials and skipping zip64 support, encryption, multifile zips, and all other compression methods than “store” (no compression) and “deflate” (easily decompressed with zlib, see below). Even with barebones setup, my zip routines would handle about 99.9 % of zips out there just fine.
Drawing on excellent ZIP format documentation from InfoZip’s latest appnote, the file structure I needed to parse seemed to have the following structure:
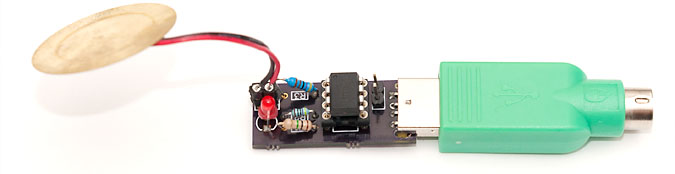
Today’s post is something I’ve prepared for a long time. Hardware-wise it’s a simple thing – ATtiny45 emulating a PS/2 device, sending a keypress when three knocks are detected in the attached piezoelectric sensor (or piezo buzzer as they are also called). But if your computer can boot on PS/2 keyboard input and you have your computer stowed somewhere hard to reach (or just want to impress your friends), it’s a pretty neat little gadget! Here’s a video of it in action:
My PC takes a few seconds to put anything on display, but if you look at the bottom right corner, you can see the blue power LEDs light up immediately after the knocks.
What You’ll Need
Hardware-wise this hack is super simple. You’ll need less than $10 in parts and many probably already have these lying around:
ATtiny45. Actually, any ATtiny or ATmega with 4kB or more flash, A/D converter and two timers will work with small adjustments, and with -Os -DMINIMAL compiler flags also 2kB MCUs (ATtiny2313 doesn’t have a A/D but you can either work around it or use a button)
Piezo buzzer and 1 Mohm resistor to act as knock sensor
PS/2 connector, or alternatively a passive USB-PS/2 adapter (I have half a dozen from old keyboards and mice) and USB cable (like the one I used in my V-USB tutorial)
Breadboard and wire. Alternatively you can solder it on a simple PCB like I eventually did.
Optionally, a 4k7 ohm pullup resistor for RESET line, and a LED and 330 ohm resistor to indicate state
The Schematic and Breadboard Setup
The PS/2 part as discussed in my minimal PS/2 keyboard post doesn’t require any other hardware than the ATtiny. The piezo element uses a 1 Mohm resistor like in the Arduino Knock Sensor tutorial, providing a path for voltage level to get back to zero over time. The LED is connected to PB4.
The PS/2 connector also provides power to the device. Instead of soldering a custom PS/2 connector for the project, I took a passive USB-PS/2 adapter I had lying around and used a multimeter to find out which USB pins correspond to the PS/2 ones. Not surprisingly, PS/2 GND and VCC are connected to USB GND and VCC. In my adapters, PS/2 clock was connected to D+ and data to D-. You can see the mnemonic printout I made on that one below, as well as one possible breadboard configuration.



{kind=link}
{kind=link}