The keyboard is something that I use daily, and whether I’m writing e-mails or coding, I’ll likely do several hours of typing a day. Last summer when I switched to US layout in coding and started using Vim, I started thinking that maybe I should upgrade my seven year old Logitech keyboard to something hopefully better. And when I get such a project, I did what I always do: Went totally overkill with research and ended up spending a few hundred euros once I had made up my mind on the “most optimal choice” for me. :)
My worldview after 2000 was essentially that laptop type flat keyboards are the way of the future, and keyboard choice mainly depends on whether you buy a Logitech or Microsoft one, and do you get the top of the line model or an OEM version for 15 euros. Enter Geekhack and some interesting discussions at Stack exchange, and it quickly became apparent that there is more to it.
First choice one needs to make is the layout of the keyboard. Kinesis makes some weird looking ones that some people swear by, and there are matrix-type layouts, I decided I would continue to risk carpal tunnel syndrome with a “normal” layout for the time being, as I don’t want to optimize my brain for a keyboard type that would only be available at home.
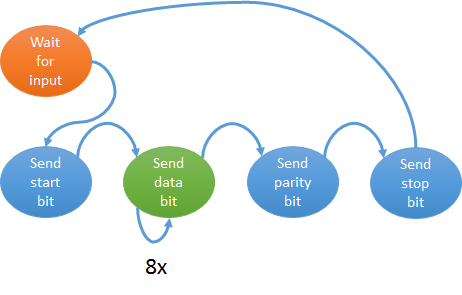
Many electronics projects involve the device transitioning from one state to another. On a high level, it could be that your project is initially in a state where it awaits input, and once it receives it, it goes to another state where it performs a series of actions, eventually returning back to the initial state. On a lower level, many communications protocols are often simple or increasingly complex state machines. In many cases, an elegantly implemented state machine can simplify your code and make it easier to manage.
There are several methods to implement state machines programmatically starting from simple if-conditions to state variables and switch structures. In this tutorial I’ll cover a slightly more advanced method of using callbacks or “function pointers” as they are implemented in C. This has some performance benefits, makes up for some clean code, and you’ll learn a bit on the way!
State Machines with Conditionals
First, to introduce the idea of a state machine, lets take a simple example: Blinking LEDs. Imagine you want the LED to turn on for a second, and then turn off. We could do it with a simple 2-state machine:
enum states { LED_ON, LED_OFF};enum states state = LED_OFF;while(1) { if(state == LED_OFF) { led_on(); state = LED_ON; } else { led_off(); state = LED_OFF; } sleep(1); // sleep for a second}
If you can understand the code above, you have pretty much grasped the fundamentals of state machines. We have some processing specific to given state, and when we want to go to another state, we use a variable (in this example it’s called state) to do that. And by the way, if you haven’t encountered enum before, you should check out Enumerated type in Wikipedia. It’s a very handful tool to add to your C coding arsenal.
I made a big step in coding geekdom this summer by upgrading the most low-level part of my programming workflow. It started when I got frustrated with Mac keyboard shortcuts on Scandinavian keyboard layout (they Just Don’t Work for most apps), and switched to US layout in coding. Once I made that transition, I started thinking that maybe I could improve my coding speed a bit more, and see what all the fuzz is about Vim.
The greatness of Vim in coding comes from the fact that Vim has separate modes for editing text, and navigating around. While not editing, all normal keys become powerful commands, and you can do text manipulation like duplicating lines, indenting sections etc. without ever leaving this “normal mode”.
Well, Vim is great, but an additional bonus to its power is the fact that almost every *nix system has it preinstalled. So even if I’m not on my own computer, I can just launch an SSH client and use Vim to edit the piece of code I’m working on. No need to compromise. Except color schemes, which I just couldn’t get working over Putty. Today I solved that puzzle after one and half hours of googling, and thought to share the findings, maybe someone will find this the next time they face the problem.
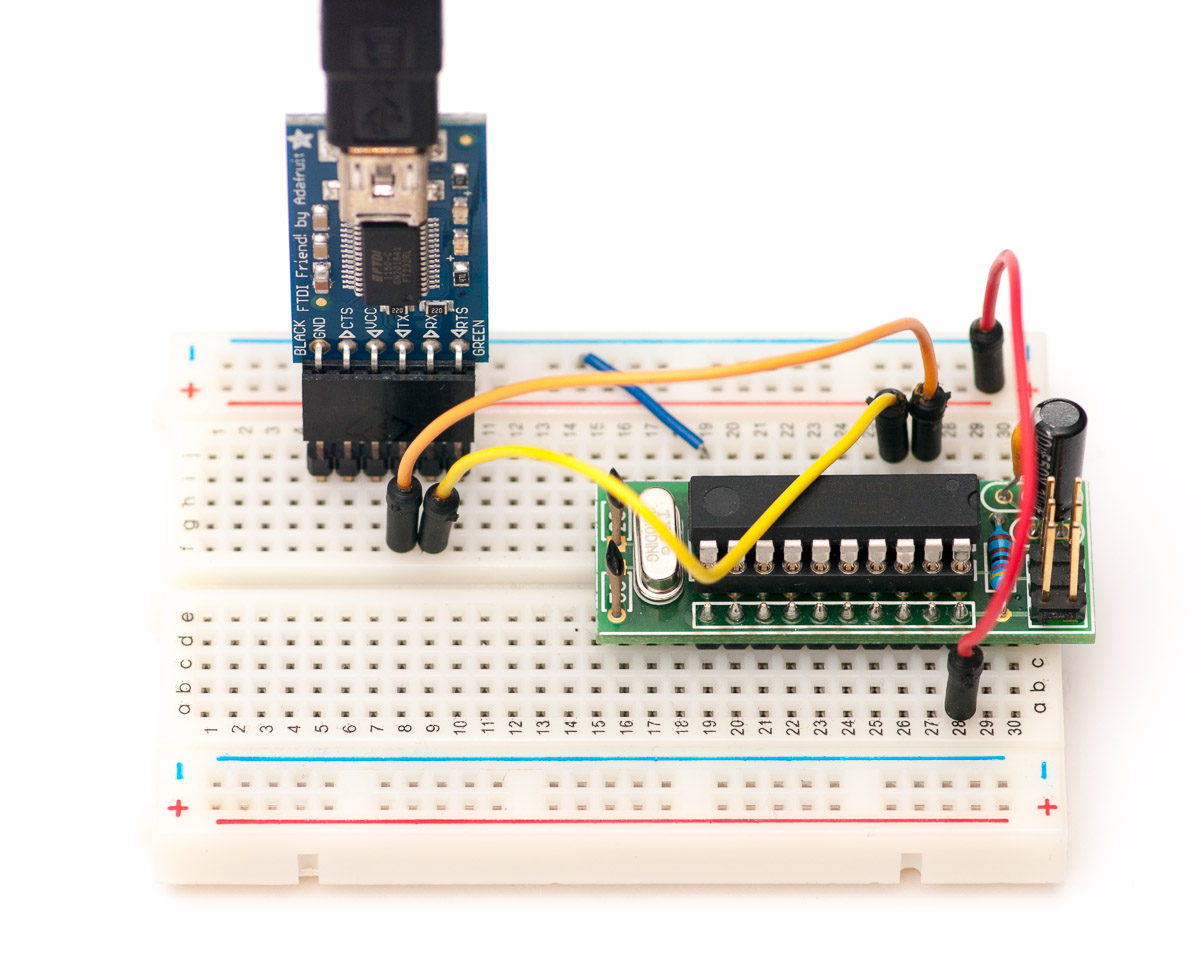
While banging my head against the wall with debugging my PS/2 keyboard thingy, I really wished I had a dedicated logic analyzer (preferably with PS/2 decoder, but even raw binary data would’ve been fine). So I decided to try out a long hatched idea – combine an ATtiny2313 and FTDI for some unlimited-length logic capturing with a PC. You’ll only need:
ATtiny2313
20 MHz crystal and caps (slower will also work, frequency just defines what baud rates you’ll achieve)
Optionally, some power-stabilizing capacitors, reset pullup and ISP programming header for flashing the firmware
ATtiny2313 is ideal for this, as it has all eight port B pins on one side in numerical order – attaching up to 8 logic lines is really straightforward. With 20 MHz crystal, baud rates close to 1 Mbps can be achieved in fast serial mode. I used Adafruit’s FTDI Friend for really simple (and way faster than most cheap serial adapter dongles) serial to USB conversion – just connect ATtiny RXD pin to TX, and TXD to RX, and you can even get power from the Friend so you’re all set! For crystal and that other stuff, see my ATtiny2313 breadboard header post for schematic, the picture above should fill you in with the rest.
Firmware code
This device has some of the smallest firmware codebases ever (firmware is 128 bytes). All we need to do is to set up UART with desired speed, and have the AVR chip to fire up an interrupt whenever data has been sent, and then use that to send current state of port B (using PINB):
#include <avr/io.h>#include <avr/interrupt.h>void USARTInit(unsigned int ubrr_value, uint8_t x2, uint8_t stopbits) { // Set baud rate UBRRL = ubrr_value & 255; UBRRH = ubrr_value >> 8; // Frame Format: asynchronous, 8 data bits, no parity, 1/2 stop bits UCSRC = _BV(UCSZ1) | _BV(UCSZ0); if(stopbits == 2) UCSRC |= _BV(USBS); if(x2) UCSRA = _BV(U2X); // 2x // USART Data Register Empty Interrupt Enable UCSRB = _BV(UDRIE); // Enable The receiver and transmitter UCSRB |= _BV(RXEN) | _BV(TXEN);}int main() { // 230.4 kbps, 8 data bits, no parity, 2 stop bits USARTInit(10, 1, 2); // replace 10 with 4 to get 0.5 Mbps sei(); // enable interrupts while(1) {} return 1;}ISR(USART_UDRE_vect) { UDR = PINB;}
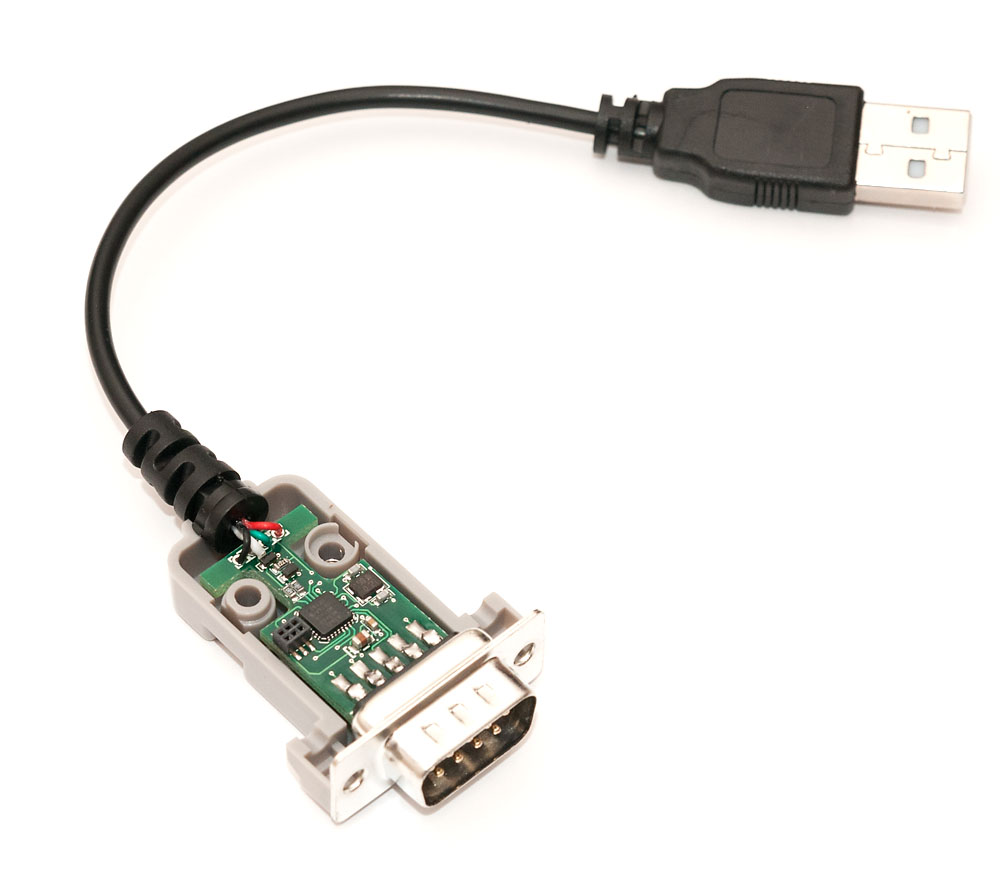
There are a ton of cool gadgets available in eBay, and even though I sometimes do impulse buys, I rarely mention those in my blog. However, this extremely cool piece of retro tech is something I just cannot pass by without a comment: Retronic Design USB joystick adapter. It is essentially a joystick adapter for the popular 9-pin D-SUB connector used in many of the 80s consoles, most notably Atari, Commodore 64 and Amiga. On the outside, it’s not much to be excited about – USB connector on the one end, and grey dongle that accepts a joystick on the other. However, things quickly change when you open up the enclosure (click on the image for a large view):
Inside the D-SUB end there is a very neat little piece of engineering, and many of my readers probably know how to program it — it isn’t anything other than a ATmega8A, a 8-bit AVR microcontroller that employs the same V-USB library I’ve covered in my tutorials to appear as a USB HID device on PC side.
All the components are on one side, and you have to admire the tiny ISP header the Retronic Design guys have fitted on the PCB. And wait, it doesn’t stop there. On the Retronic Design web site, they have full specifications for the device, and the download page includes both schematic, as well as full source code to the firmware.
Something else than electronics this time: A real life hack for your keychain to make it possible for a finder to contact you in case you lose it, while maintaining full anonymity. There are commercial alternatives, but I already need the red plastic piece for shopping cart locks and decided two tags would waste valuable pocket estate.
Using my own phone number or e-mail was out of question, because they would easily lead to my home address. So I chose a very simple, free “public email” provider, Spambog. The service treats email addresses more like web URLs so there’s no expiration or need for password protection, but if you choose a too simple alias, chances are that someone else might choose to use it, too!
Spambog offers a nice RSS and URL options to follow the e-mail (no forwarding, though, but you should only receive 0-1 emails ever so who cares). And even if someone did choose the same alias, the only drawback would be the possibility of a random person receiving the same “I found your keys!” mail, and chances are they don’t live nearby and do robbing houses as side job.